The Framework of See-NeRF
The Framework of See-NeRF
The Results of See-NeRF
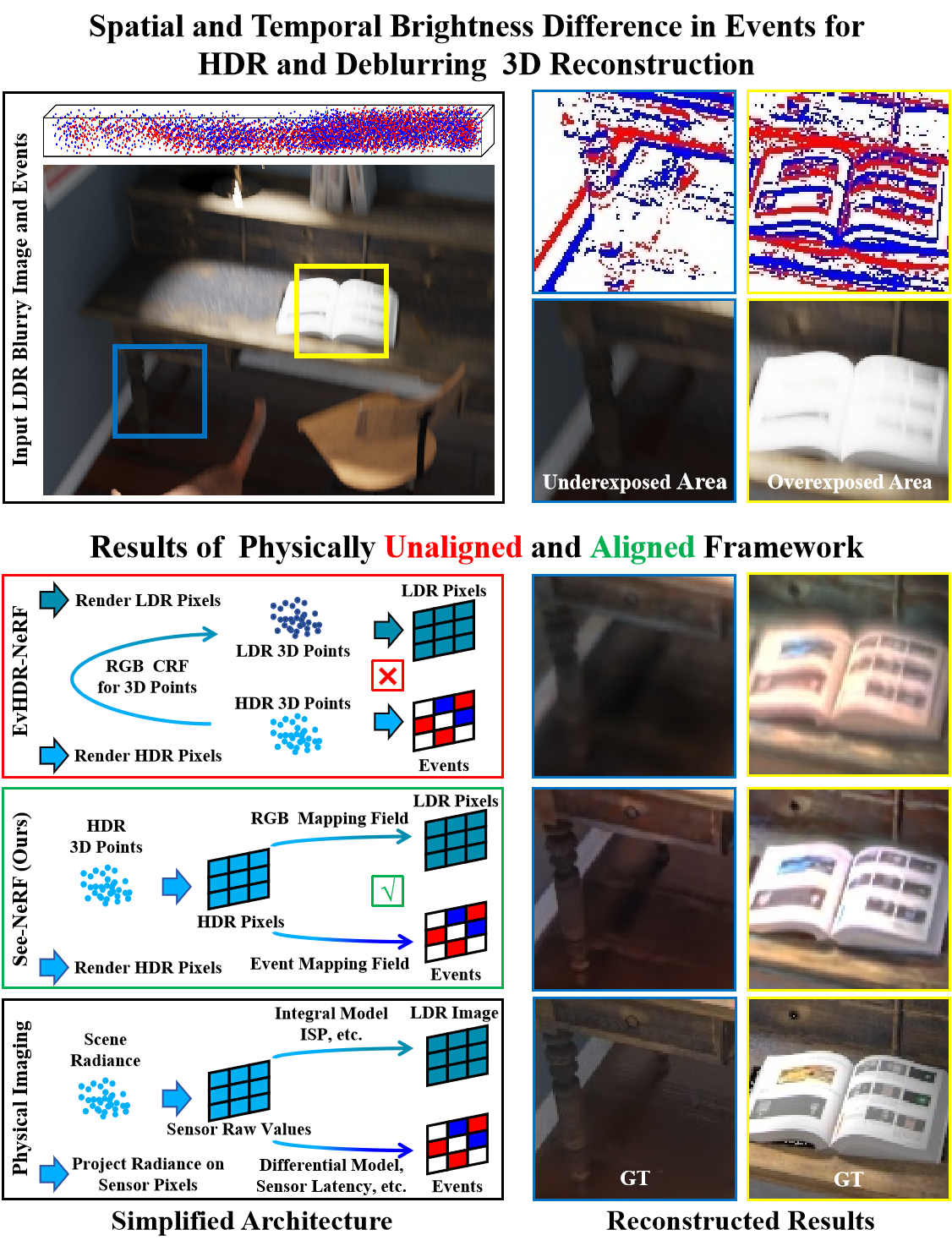
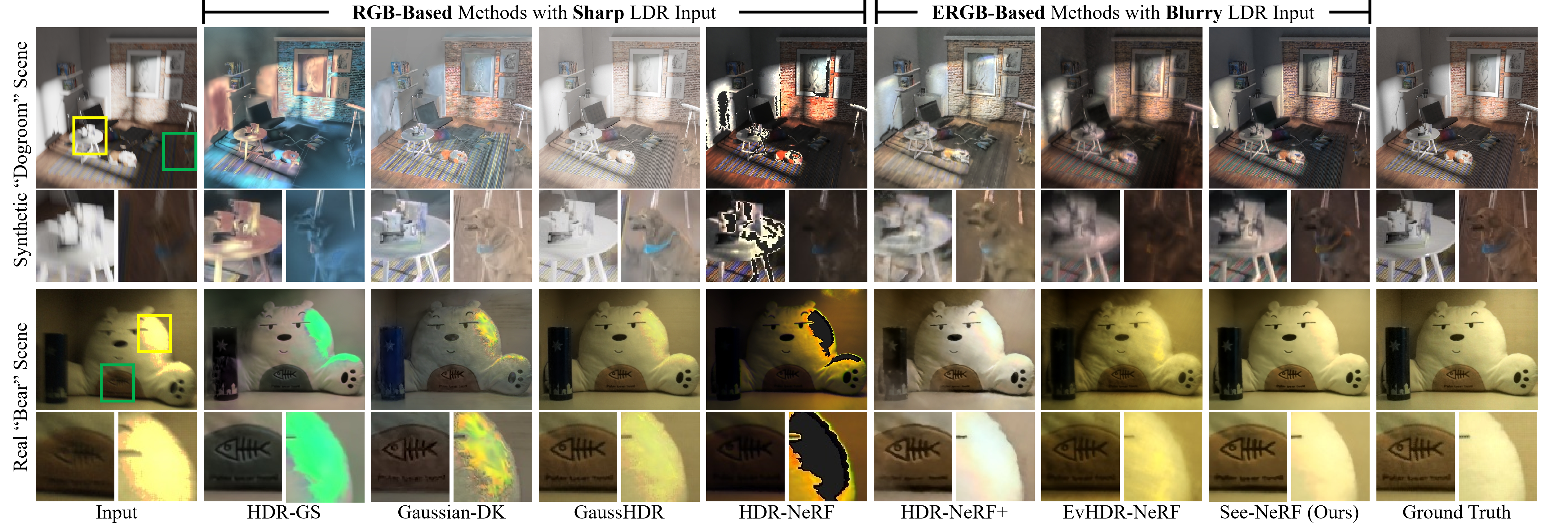
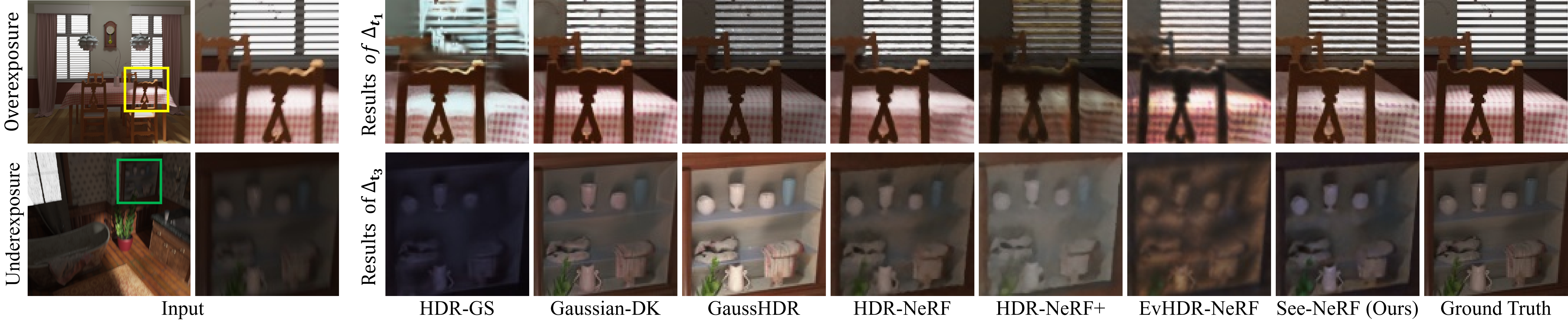
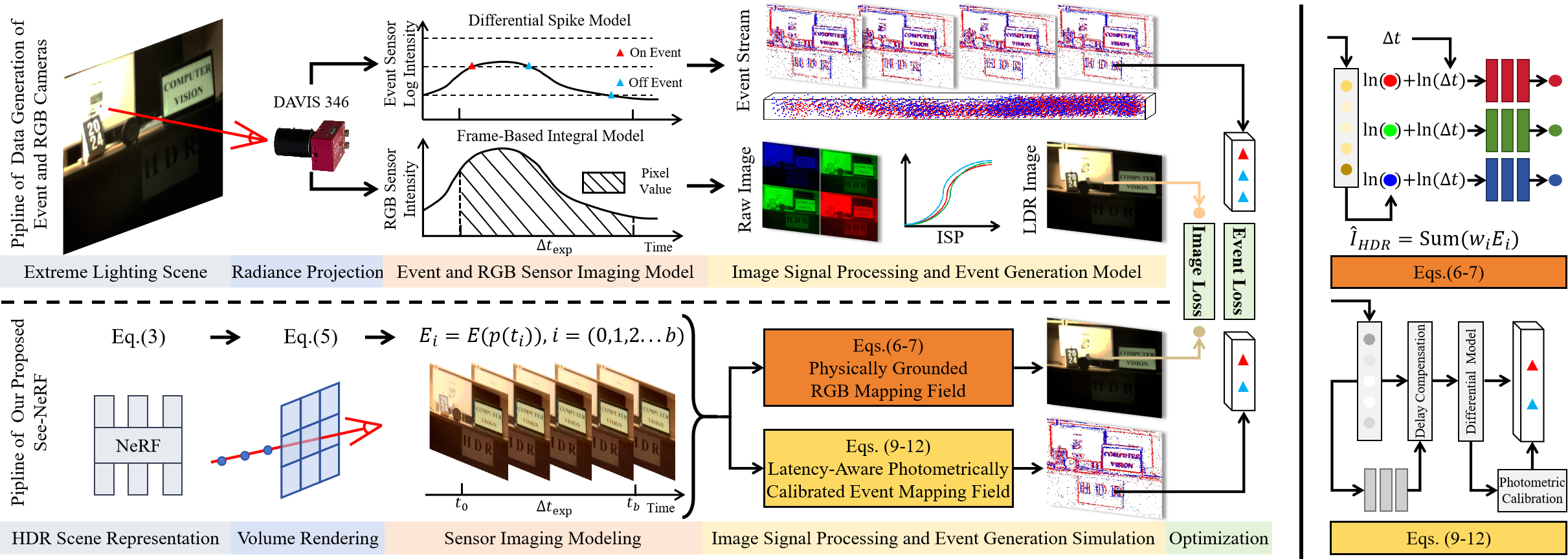
Novel view synthesis from low dynamic range (LDR) blurry images, which are common in the wild, struggles to recover high dynamic range (HDR) and sharp 3D representations in extreme lighting conditions. Although existing methods employ event data to address this issue, they ignore the sensor-physics mismatches between the camera output and physical world radiance, resulting in suboptimal HDR and deblurring results. To cope with this problem, we propose a unified sensor-physics grounded NeRF framework for sharp HDR novel view synthesis from single-exposure blurry LDR images and corresponding events. We employ NeRF to directly represent the actual radiance of the 3D scene in the HDR domain and model raw HDR scene rays hitting the sensor pixels as in the physical world. A 2D pixel-wise RGB CRF model is introduced to align the NeRF rendered pixel values with the sensor-recorded LDR pixel values of the input images. A novel event CRF model is also designed to bridge the gap between physical scene dynamics and event sensor output. The two models are jointly optimized with the NeRF network, leveraging the spatial and temporal dynamic information in events to enhance the sharp HDR 3D representation learning. Experiments on the collected and public datasets demonstrate that our method achieves state-of-the-art HDR and deblurring novel view synthesis results with single-exposure blurry LDR images and corresponding events.